
专家好!今天来了解一项迥殊真理的科技效能 ——“Haptiknit:用于可衣着触觉的分散式刚度编织”——《Haptiknit: Distributed stiffness knitting for wearable haptics》发表于《SCIENCE ROBOTICS》。在当代科技发展中,可衣着触觉莳植越来越受到照看,但传统的莳植存在不少问题,比如刚性实施器和清贫电源系统影响可衣着性亚洲桃色网,软材料又难以很好地分派刚度已毕存效触觉反馈。而 Haptiknit 技巧的出现,为这些问题带来了改进性的措置有缱绻。
*本文只作念阅读条记共享*
一、引子
在目下科技边界,可衣着触觉莳植的发展备受照看。然则,传统莳植存在诸多局限,如依赖刚性实施器和清贫电源系统,影响可衣着性;软材料虽适意但力传递和触觉反馈需更好的刚度分派。本连系的“Haptiknit”技巧旨在措置这些问题,通过分散式刚度编织齐集软气动实施器,为可衣着触觉带来新的阻扰。
二、分散式刚度编织:旨趣与模范
(一)刚度限度的两种式样
1、调动编织拓扑结构
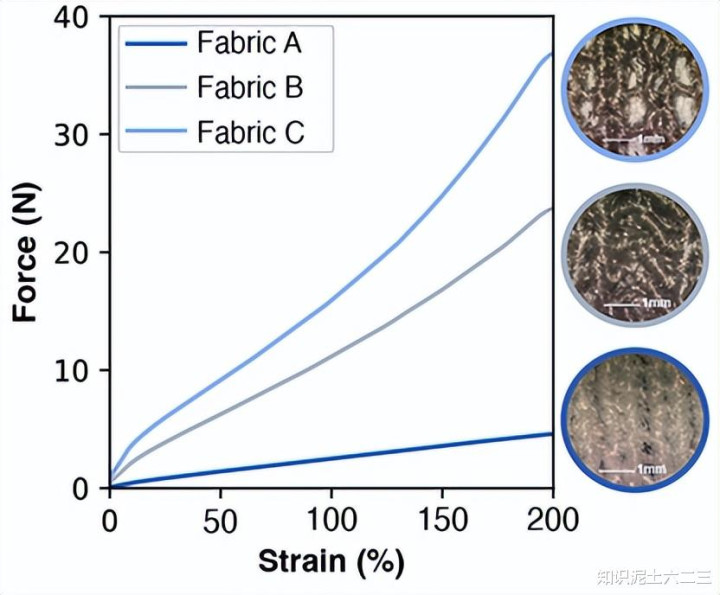
通过调动编织物的拓扑结构,如结的类型和图案,可显赫影响织物刚度。举例,咱们对由换取纱线(Yeoman540Denier80/20尼龙/Lycra)制成的三种不同拓扑结构的软织物进行单轴测试。织物A是单层½-gaugerib,织物B是双层古道½-gauge单古道物(正面)和¼-gauge单古道物(后面),织物C是三层阻隔织物且中间层有褶皱。测试终端表露,它们的刚度变化可达8.43倍,况兼皆呈现典型的超弹性活动。从显微镜图像中也能了了看到拓扑结构的各别。
2、添加热会通剂
在编织经由中遴荐性添加热会通剂(热塑性纤维,如HMS-Griltech390DenierGrilonK85),并在热定型后处理法子中融解,可产生全局硬化效果。咱们测试了三种不同含量的热会通剂在织物中的情况,区分是织物D(占总织物分量的28.3%)、织物F(44.4%)和织物G(54.2%)。终端标明,跟着热会通剂浓度加多,织物刚度最大可加多4.9倍,从最软的织物A到最硬的织物G,刚度各别近400倍。从显微镜图像中不错看到,跟着热会通剂含量加多,更多硬化树脂气泡出现,材料呈现出越来越强的塑性活动。
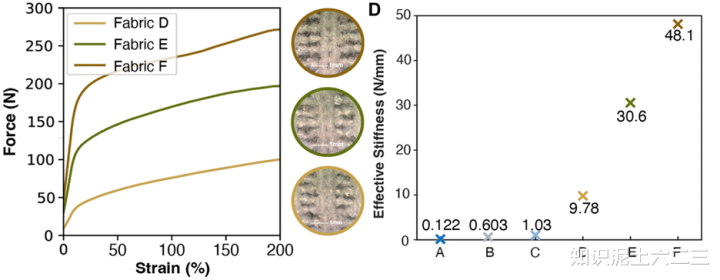
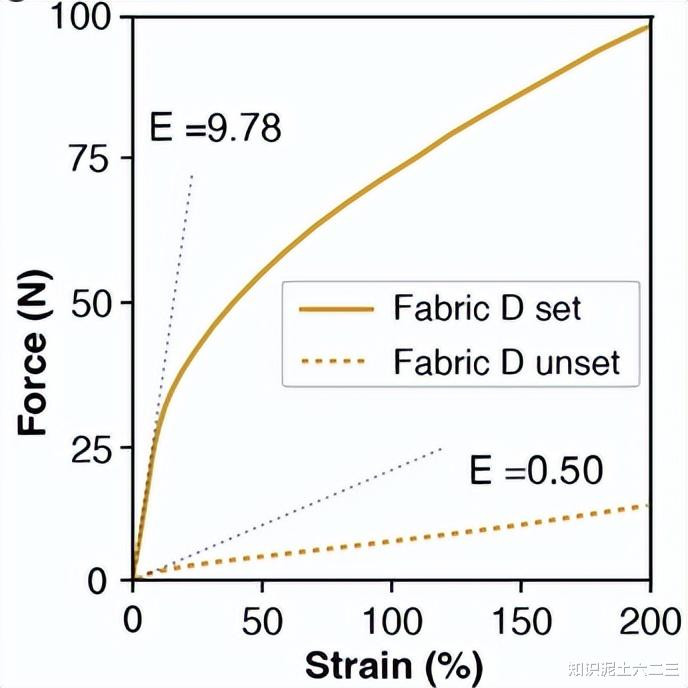
推敲到适意性,咱们在袖套中遴荐了织物D,其刚度足以吹法螺负载传递需求,且在热定型前后,织物从典型的超弹性反馈盘曲为塑料反馈,刚度因子为19.6。
(二)Haptiknit材料与性能
1、编织层想象
Haptiknit触觉袖套是一个悉心想象的多层结构。它由两层主要编织层构成,每层又细分为三个子层,统共六个纺织子层。通过私密限度编织拓扑结构和材料,已毕了刚度变化突出两个数目级。
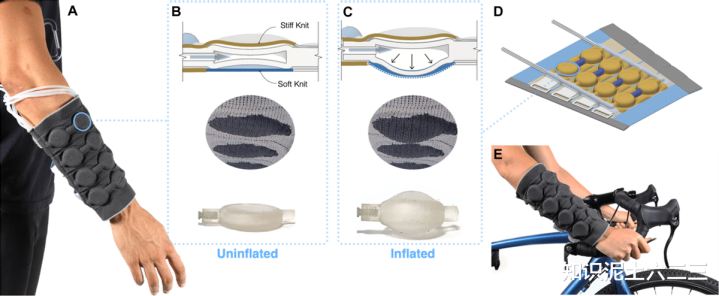
低刚度区域(织物A、B、C)有不同功能。织物A区域与实施器充气区域战斗,会随气动压力蔓延和减弱;织物B区域在实施器两侧,便捷软管从实施器到供气系统的布线;织物C区域是窄小的横向弹性织物,位于每个实施器之间,使整个系统能周折、扭转并合乎不同用户的躯壳时局。
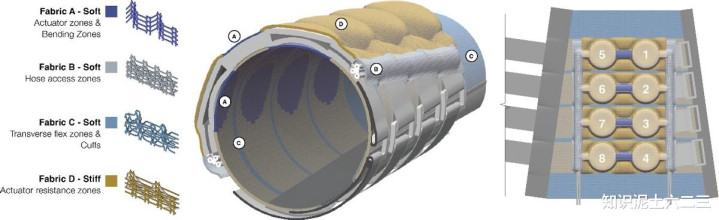
高刚度区域(织物D)的想象方针是保握高刚度材料的周向一语气性,将作能源齐集到可变形区域,同期经管袖套在躯壳上的拼装。咱们遴荐织物D而不是织物E和F,是因为它在方针力传递和用户适意性之间达到了较好的均衡。
2、实施器遴荐与集成
咱们接管3D打印的软实施器,为了信托最好的材料类型和实施器厚度,对不同材料(Elastic50A和Flexible80A)和厚度(1.0、1.5、2.0mm)的实施器进行力反馈测试。在测试中,推敲力而不是位移,因为位移会因用户皮肤弹性不同而变化。

测试终端标明,系数实施器在最大压力为230kPa时至少能达到35N的力。最终咱们遴荐了Elastic50A材料、2mm壁厚的实施器。在标准系统压力(175kPa)下,它可已毕最大24N的力。而且,咱们对最终实施器建立进行了轮回测试,在100个轮回内,实施器保握了知道的性能。
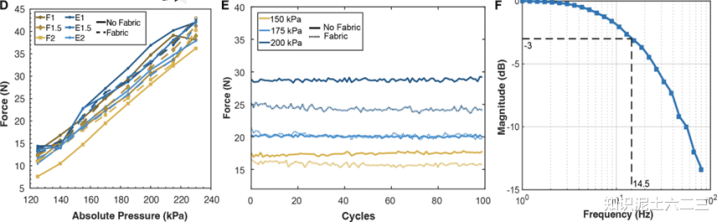
同期,咱们还测量了实施器的频率反馈和带宽,终端表露带宽为14.5Hz,这意味撰述能源不错在高于东说念主类自主通顺带宽(约10Hz)的频率下变化,能产生天然的触觉嗅觉。
 亚洲桃色网
亚洲桃色网
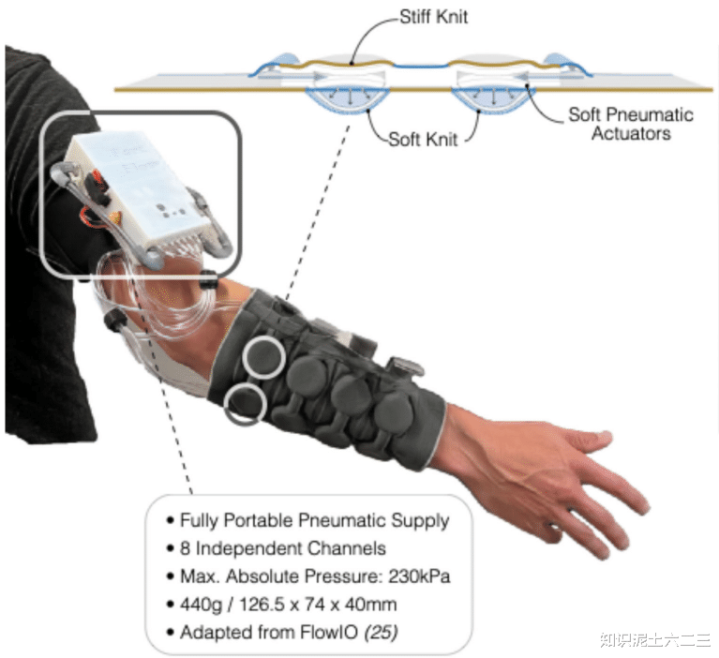
3、气动系统
咱们开拓了一种定制的便携式气动系统AirPort1.0,为实施器提供能源。这个系统是基于Shtarbanov等东说念主的FlowIO想象纠正而来。它重440g,具有双稳态供气功能,每个端口不错在由正压泵提供的充气通说念和由真空泵流通的放气通说念之间孤独切换,从而每个端口有四种可能的情景:充气、保压、放气(用真空)和环境压力。
与其他便携式气动系统比拟,AirPort1.0具有上风。举例,与ProgrammableAir系统比拟,它有更多的输出端口;与Kim等东说念主的莳植比拟,天然压力边界小,但它有八个端口且能产生真空,分量也唯有其六分之一,况兼不错适意地率领在上臂万古刻使用。
三、用户连系:想象与终端
(一)实验想象
进行了一项有32名参与者的用户连系,包括三个部分,区分针对情感和判别触摸,同期还有实验后的评估。参与者通过大学邮件列表招募,涵盖不同庚岁和性别,且皆提供了知情甘心,连系有缱绻也赢得了斯坦福大学机构审查委员会的批准。参与者在实验中率领袖套在右前臂,实施器位于背侧,实验经由中参与者肘部撑握,前臂和袖套在空中开脱搁置,并用盒子讳饰,同期率领主动降噪耳机播放白噪声,实验者通过自界说图形用户界面限度作动阵势。在实验前,咱们对袖套输出进行了校准,信托每个参与者能嗅觉到实施器压痕的最小压力以及开动嗅觉不惬意的压力。
(二)实验终端
1、实施器定位准确性
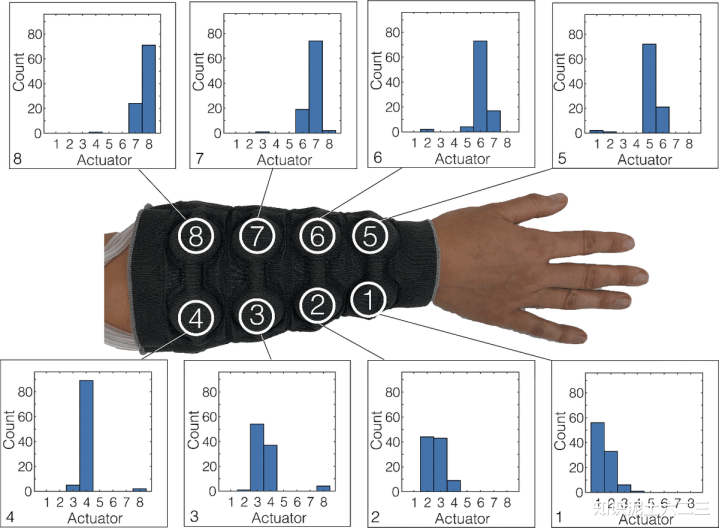
在实施器定位测试中,咱们将每个实施器按校准后的最大压力充气三次,每次充气后让参与者猜想是哪个实施器被充气,实施器位置用1-8编号。
终端表露,整个实验的总体准确率为69%,远远高于立时猜想的12.5%。正确的实施器恒久是最有可能被选中的,得分第二高的实施器位置频繁是平直相邻且在湮灭瞥。而且,对于前臂内侧(实施器5-8)和外侧(实施器1-4)的判断准确率高达98%,其中内侧实施器的斟酌准确率为76%,外侧为63%。与振动刺激比拟,这种基于准静态位移的触觉模范在判别触摸方面更奏凯,举例在近似的前臂实施器定位连系中,振动刺激的准确率频繁在35%-55%之间,而咱们的模范准确率更高。
2、抚摸阵势感知
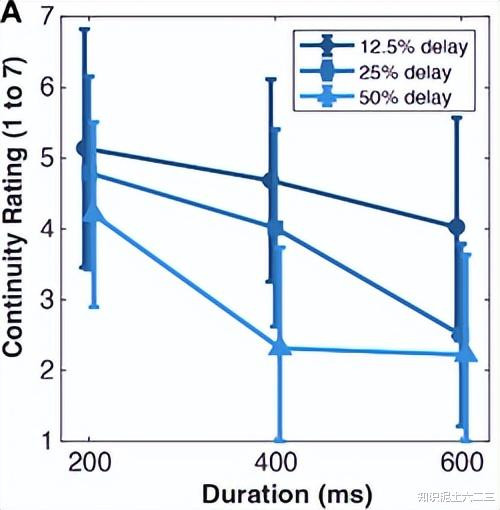
为了模拟抚摸嗅觉,咱们按规律充气实施器5-8,调动充气握续时刻和延长(延长界说为下一个实施器开动充气相对于面前实施器充气握续时刻的百分比)。
参与者对九种抚摸阵势的一语气性和愉悦度进行评价。一语气性方面,当延长固定时,跟着充气握续时刻加多,一语气性镌汰;当充气握续时刻固定时,跟着延长加多,一语气性镌汰。
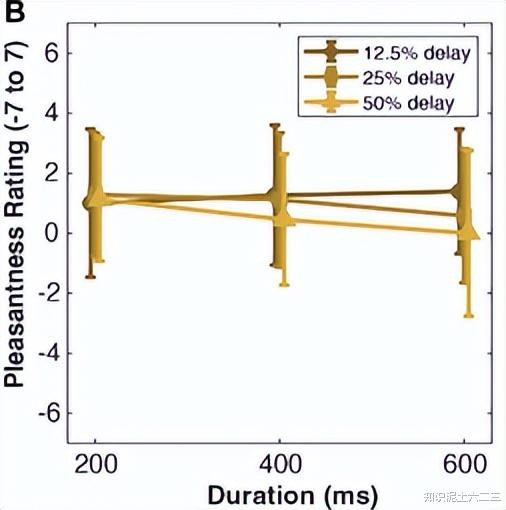
愉悦度方面,系数抚摸阵势的平均评分皆大于即是零,即莫得抚摸阵势被一致评为不慷慨。其中,充气握续时刻最短且延长最大的阵势被以为是最愉悦的,而一般来说,加多充气握续时刻会镌汰愉悦度;对于短充气握续时刻(200ms),加多延长会普及愉悦度,但对于长充气握续时刻则相背。
3、应付触摸手势识别
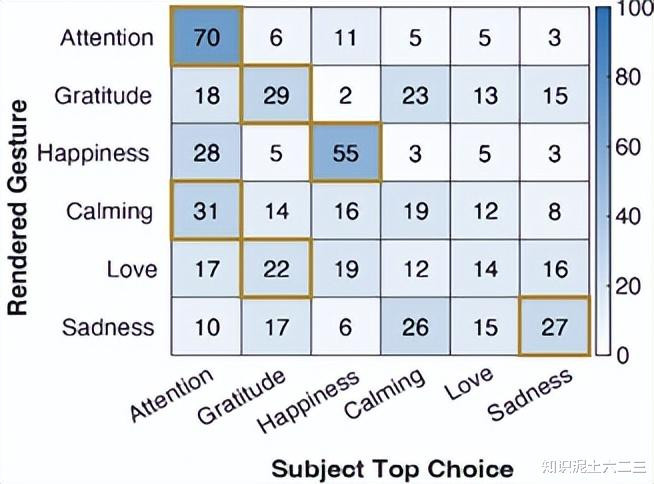
卡通色图咱们测试了参与者对六种常见应付触摸手势(看重力、谢意、幸福、稳重、爱和哀悼)的识别,这些手势是之前由Salvato等东说念主连系并映射到咱们使用的二乘四实施器布局上的。
终端表露,总体分类准确率为36%,是立时猜想率的2.2倍。其中,看重力和幸福手势的正确识别率突出立时猜想的三倍,主要期侮发生在这两个手势之间;谢意和哀悼手势的正确识别率突出1.6倍立时猜想率,且区分是各自场景下的首选。稳重和爱手势的期侮进程较高,接近立时猜想水平,导致参与者会遴荐其他手势替代,如看重力替代稳重,谢意替代爱行动首选。
参与者还对每个手势的感知效价、叫醒和信得过性进行了评价。幸福手势的平均效价评分最高为6.25,哀悼最低为4.66;幸福的平均叫醒评分最高为7.31,远高于其他手势;谢意的平均信得过性评分最高为6.88,幸福最低为3.41。
4、实验后评估
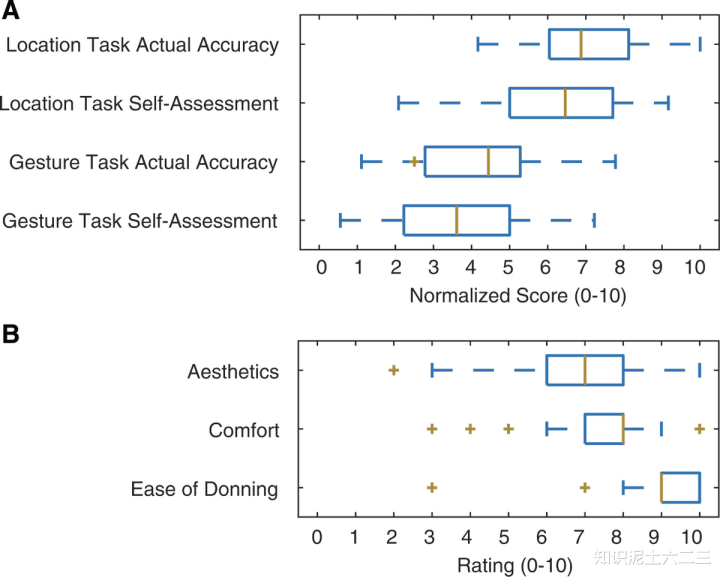
实验后,参与者对我方在定位和手势识别任务中的发扬进行了自我评估,同期对袖套的衣着便利性、适意性和好意思不雅性进行了评价(评价接管Likert量表,从0-10分)。
终端表露,参与者在定位和手势识别任务中的自我评估终端与骨子准确率相符。在袖套评价方面,衣着便利性、适意性和好意思不雅性的中位数区分为9、8和7。其中,好意思不雅性评分的均值变化与参与者之前使用东说念主机交互莳植的训诫联系,无训诫者中位数为6,有限或中等训诫者为7,丰富训诫者为8.5。参与者反馈标明,遴荐的低刚度区域和袖套的闭合机制等要害想象特征使得袖套易于衣着、适意且好意思不雅,尤其对于有过测试触觉莳植训诫的参与者。
四、连系商榷与论断
(一)商榷
1、分散式刚度的上风
通过拓扑结构和材料变化已毕的分散式刚度边界与现存连系有可比性。咱们的软材料刚度边界(0.122-1.03N/mm)与Singal等东说念主的连系终端近似,而咱们的硬材料刚度边界(9.78-48.1N/mm)比咱们和Singal等东说念主的最硬无增强织物越过两个数目级。
在实施器表征中发现,用织物B(有用刚度0.603N/mm)经管气动实施器对负载传递和变形影响可忽略不计,而织物D(有用刚度9.78N/mm)会产生“禁锢力”反馈。这标明限度实施器的负载传递需要苟简一个数目级的刚度不合称。多层编织结构大略通过一次制造和单一后处理法子已毕所需的不合称反馈,比拟通过拼装不同刚度材料的模范,大大简化了制造经由,还为合乎更复杂躯壳部位或不同期骗提供了可能。
2、Haptiknit袖套原型的可行性
用户连系终端支握了在可衣着触觉莳植中使用软气动实施器和分散式刚度编织技巧的可行性。与振动或音圈电机产生的触觉嗅觉不同,咱们的模范产生的触觉嗅觉一样或更令东说念主愉悦,能提供一语气通顺的嗅觉,况兼在传达紧密信息方面更奏凯。这为诸如费力操作、感官重映射、导航和团队成员之间的熟识通顺或交流等期骗提供了可能。
除了提供触觉刺激外,袖套和AirPort1.0的其他特色也值得照看。咱们的气动系统能限度八个实施器,力传递边界达40N,且是电板供电、无不休,可单独率领在上臂。参与者反馈标明,齐集分散式刚度编织、软实施器和魔术贴带的想象适意且易于使用,与之前的触觉袖套比拟,不错万古刻率领而不影响参与者的生动性和出动性。

3、用户连系终端的意象
从用户连系的各个部分终端来看,咱们的模范在判别触摸和传达应付触摸陈迹方面具有上风。在实施器定位测试中,准确率高于振动刺激模范;在应付触摸手势识别中,天然总体准确率低于某些已有连系,但部离异势识别效果较好,且咱们的模范能通过不同的作动阵势传达不同的情感。同期,抚摸阵势的评价终端也标明咱们的模范能产生可接受的触觉体验。
(二)论断
本连系展示了分散式刚度编织与软气动实施器相齐集在想象可衣着触觉莳植方面的渊博后劲,提供了一种普及适意性和可衣着性的原创模范。Haptiknit袖套原型考证了该技巧在情感和判别触摸方面的可行性,参与者对适意性和易用性的积极反馈突显了其持久率领的实用性。该连系为可衣着触觉莳植的想象和已毕引入了改进框架,为增强东说念主机交互期骗铺平了说念路。
五、整个来作念作念题吧
1、触觉在普通任务和应付互动中皆迥殊遑急,以下哪项不是可衣着触觉莳植的期骗场景?
A. 为盲东说念主提供导航指挥
B. 增强虚构执行游戏的千里浸感
C. 行动医疗手术的主要操作用具
D. 匡助东说念主们在打字时赢得更好的反馈
2、在分散式刚度编织中,通过调动编织拓扑结构限度织物刚度,以下哪种织物拓扑结构刚度最大?
A. 单层 ½ - gauge rib
B. 双层古道 ½ - gauge 单古道物(正面)和 ¼ - gauge 单古道物(后面)
C. 三层阻隔织物且中间层有褶皱
D. 无法信托
3、在添加热会通剂限度织物刚度的实验中,哪种织物使用的热会通剂占总织物分量的比例最高?
A. 织物 D
B. 织物 F
C. 织物 G
D. 织物 E
4、Haptiknit 触觉袖套的编织层想象中,以下对于低刚度区域织物功能描绘伪善的是?
A. 织物 A 区域与实施器充气区域战斗,会随气动压力蔓延和减弱
B. 织物 B 区域在实施器两侧,便捷软管从实施器到供气系统的布线
C. 织物 C 区域是窄小的横向弹性织物,用于经管袖套在躯壳上的拼装
D. 低刚度区域接管弹性纱线编织
5、对于 3D 打印的软实施器,最终遴荐的材料和壁厚是?
A. Elastic 50A,1.0mm
B. Flexible 80A,1.5mm
C. Elastic 50A,2.0mm
D. Flexible 80A,2.0mm
6、在用户连系的实施器定位测试中,参与者斟酌实施器位置的平均准确率是若干?
A. 12.5%
B. 35% - 55%
C. 69%
D. 80%
7、在抚摸阵势感知测试中,当充气握续时刻固定时,抚摸阵势的一语气性会跟着延长怎么变化?
A. 先加多后镌汰
B. 不变
C. 加多
D. 镌汰
8、在应付触摸手势识别测试中,哪种手势的正确识别率突出立时猜想的三倍?
A. 稳重和爱
B. 谢意和哀悼
C. 看重力和幸福
D. 系数手势
9、与现存连系比拟,Haptiknit 技巧在分散式刚度方面的上风不包括以下哪项?
A. 多层编织结构通过一次制造和单一后处理法子已毕不合称反馈,简化制造经由
B. 刚度边界与现存连系比拟有极大各别,无法兼容其他期骗
C. 不错为想象合乎更复杂躯壳部位或不同期骗提供可能
D. 大略更好地限度实施器的负载传递
参考文件:
Cosima du Pasquier et al. Haptiknit: Distributed stiffness knitting for wearable haptics. Sci. Robot.9亚洲桃色网, eado3887(2024).